/** They are then transferred to the queue to * re-acquire. And because conditions can only be exclusive, * we save a field by using special value to indicate shared * mode. */ /** * 条件队列 condition 中的后继结点, 或者是特殊值 SHARED * 条件队列仅在独占模式下才可访问 */ Node nextWaiter;
/* * Thread to unpark is held in successor, which is normally * just the next node. But if cancelled or apparently null, * traverse backwards from tail to find the actual * non-cancelled successor. */ // 从后向前寻找且 non-cancelled 的后继结点 Node s = node.next; if (s == null || s.waitStatus > 0) { s = null; for (Node t = tail; t != null && t != node; t = t.prev) if (t.waitStatus <= 0) s = t; } if (s != null) // 如果结点状态为 non-cancelled, 直接将后继结点唤醒. LockSupport.unpark(s.thread); }
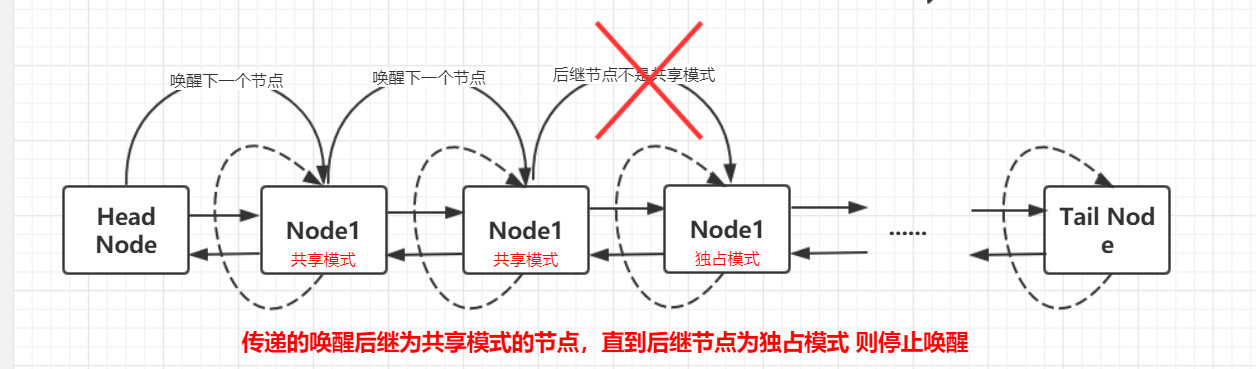
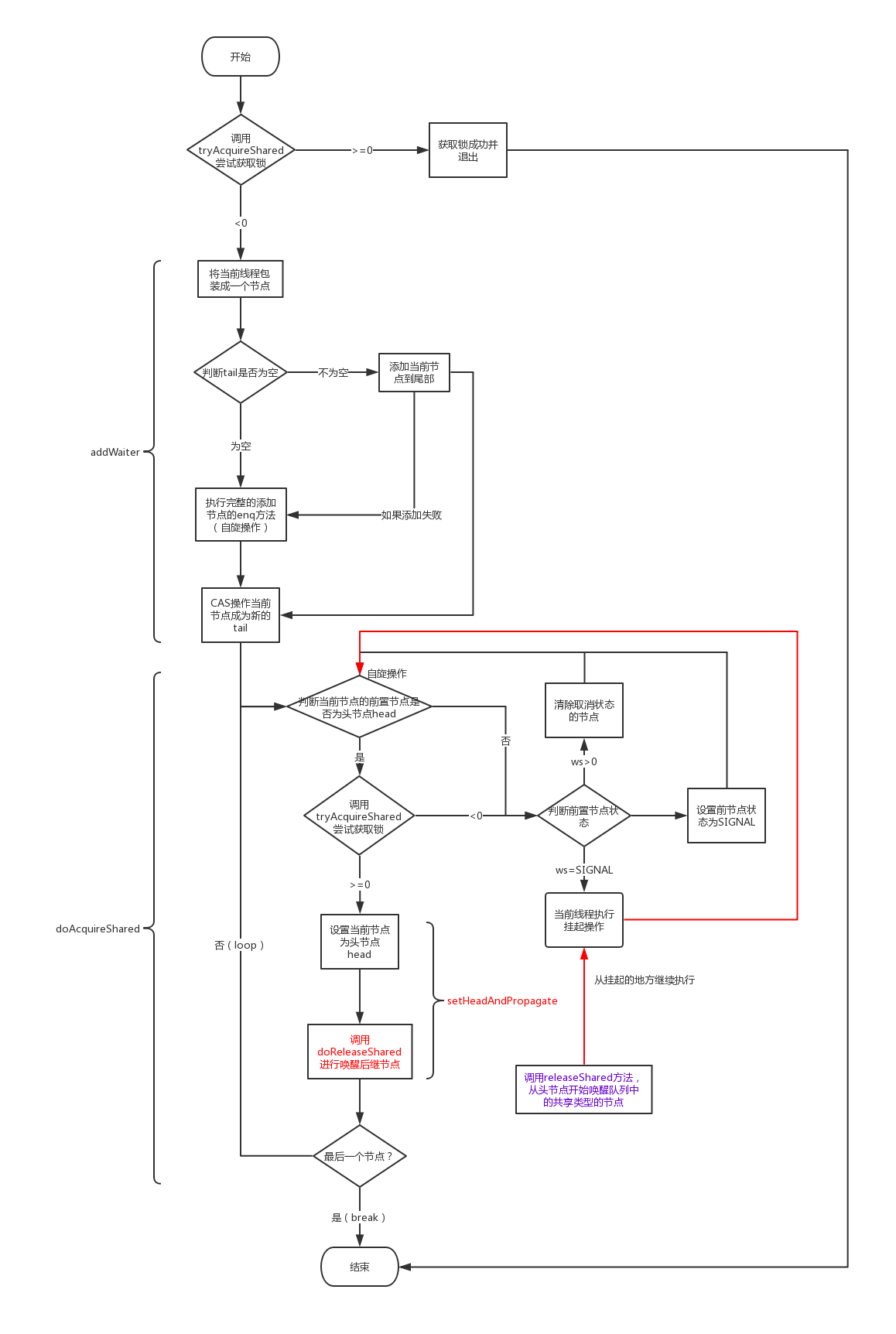
/** * Sets head of queue, and checks if successor may be waiting * in shared mode, if so propagating if either propagate > 0 or * PROPAGATE status was set. * * @param node the node * @param propagate the return value from a tryAcquireShared */ privatevoidsetHeadAndPropagate(Node node, int propagate){ Node h = head; // Record old head for check below setHead(node); /* * Try to signal next queued node if: * Propagation was indicated by caller, * or was recorded (as h.waitStatus either before * or after setHead) by a previous operation * (note: this uses sign-check of waitStatus because * PROPAGATE status may transition to SIGNAL.) * and * The next node is waiting in shared mode, * or we don't know, because it appears null * * The conservatism in both of these checks may cause * unnecessary wake-ups, but only when there are multiple * racing acquires/releases, so most need signals now or soon * anyway. */ if (propagate > 0 || h == null || h.waitStatus < 0 || (h = head) == null || h.waitStatus < 0) { Node s = node.next; // 如果节点为共享节点,则调用doReleaseShared函数唤醒后继节点。 if (s == null || s.isShared()) doReleaseShared(); } }
/** * Release action for shared mode -- signals successor and ensures * propagation. (Note: For exclusive mode, release just amounts * to calling unparkSuccessor of head if it needs signal.) */ privatevoiddoReleaseShared(){ /* * Ensure that a release propagates, even if there are other * in-progress acquires/releases. This proceeds in the usual * way of trying to unparkSuccessor of head if it needs * signal. But if it does not, status is set to PROPAGATE to * ensure that upon release, propagation continues. * Additionally, we must loop in case a new node is added * while we are doing this. Also, unlike other uses of * unparkSuccessor, we need to know if CAS to reset status * fails, if so rechecking. */ for (;;) { Node h = head; if (h != null && h != tail) { int ws = h.waitStatus; if (ws == Node.SIGNAL) { // 如果节点标识后继节点需要唤醒,则调用 unparkSuccessor 方法进行唤醒。 if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0)) continue; // loop to recheck cases unparkSuccessor(h); } elseif (ws == 0 && !compareAndSetWaitStatus(h, 0, Node.PROPAGATE)) continue; // loop on failed CAS } if (h == head) // loop if head changed break; } }